プレスリリース

平成27年12月2日
株式会社国際電気通信基礎技術研究所
株式会社国際電気通信基礎技術研究所
脳活動から予測したシーンを解読
~予測の間違い「思い込み」も明るみに~
~予測の間違い「思い込み」も明るみに~
・概要
【成果】
ATR認知機構研究所の鹿内友美・石井信は、迷路ゲームに取り組むときの脳活動から次に見えてくるシーンの予測を読み取ることに成功しました。この成果は、Nature系の国際科学誌「Scientific Reports」(電子版: 英国時間 2015年12月3日10:00am公開)に掲載されます。
成果のポイント
| ♦ | 実験参加者に迷路の中を移動するコンピュータゲームに取り組んでもらい、次に見えるシーンを予想しているときの脳活動から予想したシーン(シーン予測)を解読しました。 |
| ♦ | 前頭葉内側部 (用語解説①)、上頭頂小葉 (用語解説②) は、実験参加者のシーン予測が客観的事実と違っていた場合にはその間違いを反映した応答を示すことが明らかになりました。 |
| ♦ | 予測とその間違いを読み取ることに成功した本成果は、言語化困難な情報を脳活動から読み取るコミュニケーションツールの開発などにより、生活の質(QOL)の向上に貢献することが期待されます。 |
【今回の成果により期待されること】
行動決定において予測は重要です。例えば、目的地まで移動しようとする際に、人は次に現れるシーンを予測しながら進んでいきます。本研究では、こうしたシーン予測が核磁気共鳴画像 (fMRI) による脳活動から読み取れることを見出しました。このことは、予測の脳内メカニズム解明に貢献するだけでなく、脳活動を活用した新たなコミュニケーションツールの開発に繋がることが期待されます。
・背景
職場や家などの目的地へ向かう時、もう少し行くと右手にコンビニが見える、その先にポストがあって、というように、やがて出現するシーンを思い描きながら移動していきます。これまでの研究から、どちらの方向に移動しようとしているかは、海馬の場所細胞の活動で表されていることが知られていましたが、まだ見えていない次のシーンの予測についてはよくわかっていませんでした。本研究では、予測を担う脳の領域では、シーンを予測しているときに、予測シーンによって異なる活動パターンを示すと仮定しました。そこで、これまでに空間の認知に重要と考えられてきた脳領域を対象に、予測シーンによって活動パターンに違いがあるかを調べました。
・研究内容
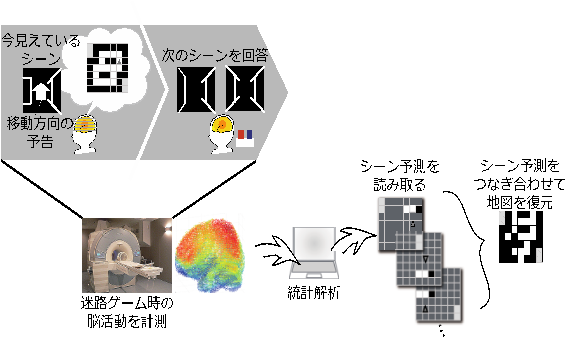
実験参加者に、fMRI装置の中で空間移動を伴うゲームに取り組んでもらい、脳活動を計測しました (図1)。ゲームは、マス目状の迷路の中で、前方視野外にあるマス目が壁であるか通路であるかを回答するものです。事前に迷路の地図を記憶した実験参加者は、9割以上の問題を正解しました。このことは、実験参加者はまだ見えていないシーンを、記憶した地図を頼りに予測していることを示しています。実験参加者が思い浮かべている次のシーンを、スパースロジスティック回帰法 (用語解説③) を用いて脳活動から読み取りました。その結果、海馬を含む領域ではなく、前頭葉内側部と頭頂葉で、シーン予測に特化して読み取ることができることが示されました (図2a)。このうち前頭葉内側部・上頭頂小葉では、実験参加者の予測が間違っているとき、迷路構造と合致した正解のシーンではなく、間違ったシーンに対応する脳活動パターンを示していました(図2b)。このことは、fMRI脳活動から、客観的事実とは異なる、主観的な「;思い込み」を読み取れたことを示しています。
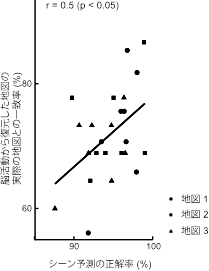
実験参加者の予測と脳活動の関係をより明確にするために、脳活動から読み取った予測を迷路上に配置していくことで、実験参加者が記憶している地図の復元を行いました。脳活動から復元された地図は、実験に用いた3種類の地図のいずれでも7割以上のマスで実際の地図と同じ構造でした。読み取った地図は、シーン予測の正答率が高い実験参加者ほど実際の地図に近いものでした (図3)。つまり、実験参加者ごとのシーン予測の巧みさは、脳活動パターンのシーン間での違いの程度によって説明できることになります。
・今後の展望
本研究では、壁と通路しかないシンプルな迷路を用いました。より複雑なシーンやシーン以外へと対象を広げることで、多様な情報を脳活動から読み取る技術の足がかりになると考えられます。本研究で示された、客観的事実と異なる主観の読み取りは、言語化困難な視覚イメージを脳活動から読み取り画像化する、といったコミュニケーションツールとしての発展が期待されます。<補足説明>
①前頭葉内側部: 脳の前方中央に位置する領域で、複雑な意思決定に関与します。海馬の場所細胞は次に進む方向に応じて活動パターンを予測的に変化させますが、その活動パターンの違いを生み出す部位だとも考えられています。
②上頭頂小葉: 頭頂葉の上側に位置する領域です。空間認知や空間注意に関わることが知られています。
③スパースロジスティック回帰: 分類規則がわかっていないデータから有用な規則を見出し、未知のデータを分類する数理統計法のひとつです。大量のデータから分類に重要な少数の特徴だけを効率よく選び出すことができます。ATR脳情報解析研究所で開発されました。
【論文情報】
Scientific Reports誌(電子版: 英国時間 2015年12月3日10:00am公開)Shikauchi, Y. & Ishii, S. Decoding the view expectation during learned maze navigation from human fronto-parietal network. Scientific Reports, 5, 17648, DOI:10.1038/srep17648 (2015)
【研究グループ】
本研究は、ATR脳情報通信総合研究所・認知機構研究所の鹿内友美 学外実習生(しかうちゆみ;京都大学・博士後期課程)、認知機構研究所の石井信 副所長(いしいしん;京都大学・教授)の共同研究成果です。*( )内は氏名よみ、兼務先を表記。
【研究サポート】
本研究は京都大学との共同で行われました。fMRI計測は、(株)ATR- Promotions 脳活動イメージングセンタの協力を得ました。本研究は、日本学術振興会科研費24300114の成果です。成果の一部は、総務省委託研究「脳の仕組みを活かしたイノベーション創成型研究開発(高精度脳情報センシング技術・脳情報伝送技術、実時間脳情報抽出・解読技術及び脳情報解読に基づく生活支援機器制御技術)」、文部科学省、および国立研究開発法人日本医療研究開発機構脳科学研究戦略推進プログラム「情動系神経情報基盤構築のための計算論的手法および実験動物の開発」によるものです。また、文部科学省「生命動態システム科学推進拠点事業」の支援を受けました。
お問い合わせ先
(株)国際電気通信基礎技術研究所(ATR)経営統括部広報担当 藤村
〒619-0288 京都府相楽郡精華町光台2-2-2
Tel: 0774-95-2524, FAX: 0774-95-1178, kikaku@atr.jp
https://www.atr.jp/index_j.html