プレスリリース


2015年1月9日
株式会社国際電気通信基礎技術研究所(ATR)
株式会社国際電気通信基礎技術研究所(ATR)
ブレイン・マシン・インタフェースと外骨格ロボット技術に基づく脳機能理解に向けた新しい方法論を提案
~動作支援を可能とする外骨格ロボット技術の脳科学への応用に向けた展開~
~動作支援を可能とする外骨格ロボット技術の脳科学への応用に向けた展開~
概要
【成果】
ATR脳情報通信総合研究所の森本淳・川人光男はブレイン・マシン・インタフェース技術と動作を支援する外骨格ロボット技術を組み合わせることによる新しい脳機能理解に向けた方法論を提案しました。この成果は、国際科学誌「Journal of The Royal Society Interface」(電子版: グリニッジ標準時間 2015年1月14日8:01am公開)に掲載されます。
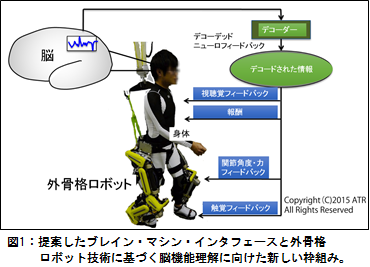 近年、脳科学とロボティクスはそれぞれに大きく発展し、その2つの領域が融合することにより、学際的な研究分野が生まれてきました。その中でも特に計算論的神経科学、脳のような機能の実装を目指したロボティクス、ブレイン・マシン・インタフェースの3つのアプローチが大きな注目を集めています。本成果においては、これら3つを統合することによる脳機能理解のための新しい方法論の提案を行いました。具体的には、ユーザの脳情報をデコーディング(復号化)することで脳活動からの動作の意図を推定、外骨格ロボットを動かすことにより、そのユーザの動作をアシストします。一方で、ユーザの脳は、体が外骨格ロボットにアシストされることにより、感覚系からのフィードバック信号を受け取ります。この脳とロボットの相互作用を通じて脳の可塑性を促し、その結果として脳機能を理解すると同時に、脳機能の回復・向上に貢献することを目的とする方法論です。この方法論の基礎となる、我々のこれまでの研究の枠組みについても紹介しています。
近年、脳科学とロボティクスはそれぞれに大きく発展し、その2つの領域が融合することにより、学際的な研究分野が生まれてきました。その中でも特に計算論的神経科学、脳のような機能の実装を目指したロボティクス、ブレイン・マシン・インタフェースの3つのアプローチが大きな注目を集めています。本成果においては、これら3つを統合することによる脳機能理解のための新しい方法論の提案を行いました。具体的には、ユーザの脳情報をデコーディング(復号化)することで脳活動からの動作の意図を推定、外骨格ロボットを動かすことにより、そのユーザの動作をアシストします。一方で、ユーザの脳は、体が外骨格ロボットにアシストされることにより、感覚系からのフィードバック信号を受け取ります。この脳とロボットの相互作用を通じて脳の可塑性を促し、その結果として脳機能を理解すると同時に、脳機能の回復・向上に貢献することを目的とする方法論です。この方法論の基礎となる、我々のこれまでの研究の枠組みについても紹介しています。【今回の成果により期待されること】
少子高齢化社会において、動作支援を行う外骨格ロボットの開発に期待が高まっています。その外骨格ロボット技術は、ブレイン・マシン・インタフェースの枠組みを通じて脳科学への応用が促進され、その結果として脳機能の回復・向上を促すことが期待されます。例えばリハビリテーションへの外骨格ロボットの応用などを視野に入れています。
背景
計算論的神経科学では、理論的な立場から脳がどのような計算アルゴリズムによって機能しているかを探ります。脳のような機能の実装を目指したロボティクスでは、ヒトと同様の身体を持つロボットを使った知覚・運動制御をおこなうことを通じて、脳の情報処理メカニズムの理解と、それを通じたヒトのようなロボット制御システムの開発を目指しています。また、ブレイン・マシン・インタフェース研究においては、主に運動に関わる脳情報をデコードし、デコードされた信号にもとづいて外部機器を操作することがおこなわれています
研究内容
まず、これら計算論的神経科学、脳のような機能の実装を目指したロボティクス、ブレイン・マシン・インタフェースの3つの分野に関して、我々の研究グループでのこれまでの取り組みについて報告しました。計算論的神経科学の -->研究としては、脳のようなモジュール構造をもつアルゴリズム[1]と階層的な学習機構をもつアルゴリズム[2]について紹介し、それらが脳においてどのように表現されているかについての考察を紹介しました。また、脳のような機能の実装を目指したロボティクス研究としては、ヒト型ロボットを使った取り組みを紹介しました。具体的には、ヒトのように多くの関節自由度を持つロボットの運動制御・運動学習を可能にする枠組みの提案をおこなってきました[3][4](図2参照)。ブレイン・マシン・インタフェース研究としては、脳波計測の結果から外骨格ロボットを駆動するBMI外骨格ロボットを紹介しています[5](図3参照)。また、外骨格ロボットの動きが、感覚系を通じて脳活動におよぼす影響に関する検証研究についての紹介をしました [6]。 以上のような、これまでの研究の取り組みの紹介をおこなった上で、最新の研究として、デコーディッドニューロフィードバック法[7]と外骨格ロボットシステムを組み合わせた脳機能理解のための方法論の提案をおこないました(図1参照)。

図2:ヒト型ロボットCB-iの歩行制御[4].

図3:ブレイン・マシン・インタフェースと外骨格ロボットを組み合わせた実験システム[5].
【論文情報】
[1]Wolpert DM, Kawato M. 1998, Multiple paired forward and inverse models for motor control. Neural Netw. 11, pp. 1317-1329.
[2]Morimoto J, Doya K. 2001, Acquisition of Stand-up Behavior by a Real Robot using Hierarchical Reinforcement Learning. Robotics and Autonomous Systems, 36(1), pp. 37-51.
[3]Sugimoto N, Morimoto J, Hyon S, Kawato M. 2012, The emosaic model for humanoid robot control. Neural Netw. 29, pp. 8-19.
[4]Morimoto J, Endo G, Nakanishi J, Cheng G. 2008, A biologically inspired biped locomotion strategy for humanoid robots: modulation of sinusoidal patterns by a coupled oscillator model. IEEE Trans. Robot. 24, pp. 185-191.
[5]Noda T, Sugimoto N, Furukawa J, Sato M, Hyon S, Morimoto J. 2012 Brain-controlled exoskeleton robot for BMI rehabilitation. In Proc. IEEE/RAS Int. Conf. on Humanoid Robots, Osaka, Japan, pp. 21-27.
[6]Lisi G, Noda T, Morimoto J. 2014 Decoding the ERD/ERS: influence of afferent input induced by a leg assistive robot. Front. Syst. Neurosci. 8, pp. 1-12.
[7]Shibata K, Watanabe T, Sasaki Y, Kawato M. 2011 Perceptual learning incepted by decoded fMRI neurofeedback without stimulus presentation, Science 334, pp. 1413-1415.
今後の展望
動作支援を行う外骨格ロボット技術は、ブレイン·マシン·インタフェースの枠組みを通じて脳科学への応用も可能となり、その結果として、運動機能の代替のみならず脳機能の回復·向上を促すことが期待されます。これらの成果は、リハビリテーションへの応用などが期待できると考えています。
【研究グループ】
本研究は、ATR脳情報通信総合研究所·脳情報研究所の森本淳室長(もりもとじゅん)、ATR脳情報通信総合研究所の川人光男所長(かわとみつお)の共同研究成果です。
∗( )内は氏名よみ。
【研究サポート】
本研究は、文部科学省脳科学研究戦略推進プログラムにより実施された「BMI技術を用いた自立支援、精神·神経疾患の克服に向けた研究開発」の成果です。また、成果の一部は、総務省委託研究「脳の仕組みを活かしたイノベーション創成型研究開発(高精度脳情報センシング技術·脳情報伝送技術、実時間脳情報抽出·解読技術及び脳情報解読に基づく生活支援機器制御技術)」によるものです。また、一部は総務省SCOPE、JST-SICP事業、日本学術振興会とMIZSとの二国間交流事業(共同研究)、文部科学省科研費23120004の助成を受けたものです。
用語集
計算論的神経科学:
知覚や運動制御の問題など、脳が解くべき問題の特性を考えることで、脳の機能を理論的な立場から理解·解明しようとする研究分野。
デコーディッドニューロフィードバック法:
ユーザの脳情報をデコードした結果を、ユーザにたとえばディスプレイ上などにフィードバックし、そのデコード結果をユーザ自身が変化させることにより、脳の可塑性を促す手法。
●関連動画はこちらから MPEGファイル(約440M) aviファイル(約22M)