プレスリリース


国立大学法人 電気通信大学
株式会社 国際電気通信基礎技術研究所 (ATR)
力強くも繊細なロボット駆動の新技術を開発
-多様な接触を模擬した実験で高性能を実証-
-多様な接触を模擬した実験で高性能を実証-
【ポイント】
*ハイブリッド駆動をロボットに組み込む際の基本課題を解消する新技術
*2つのアクチュエータを融合する「融合型ハイブリッド」という設計コンセプトを確立
*本コンセプトに基づいて空気と電気のアクチュエータを評価するベンチマークを提案
*従来アクチュエータに比べ、接触点への外乱に対する一定押しつけ力の維持能力が大幅に向上
*2つのアクチュエータを融合する「融合型ハイブリッド」という設計コンセプトを確立
*本コンセプトに基づいて空気と電気のアクチュエータを評価するベンチマークを提案
*従来アクチュエータに比べ、接触点への外乱に対する一定押しつけ力の維持能力が大幅に向上
【概要】
電気通信大学大学院 情報理工学研究科 機械知能システム学専攻の仲田佳弘 准教授と、国際電気通信基礎技術研究所 脳情報通信総合研究所の野田智之 主幹研究員は、駆動原理の異なる2つのアクチュエータ(※1)を相補的に用いることで優れた特性を実現するハイブリッド駆動(※2)がロボットに組み込みにくいという基本課題に注目し、この課題を解決する新技術を開発しました。具体的には、複数のアクチュエータのエネルギーを力に変換する構造を融合させ、あたかも1つのアクチュエータのように内部で力を合成する、新しい直動アクチュエータの設計コンセプト「融合型ハイブリッド直動アクチュエータ(FHLA: Fusion Hybrid Linear Actuator)」を確立しました。この設計コンセプトに基づき、空気圧シリンダとダイレクトドライブのリニアモータを融合させたアクチュエータは、空気または電気のみを動力源とする場合と比較して、動きの外乱(※3)に対して、広い力の範囲で一定の押しつけ力を維持する能力が大幅に向上したことが実験で示されました。この実験結果により、従来のアクチュエータよりも接触点における動きの外乱に対して優れた力制御性能を持つことが示されました。本研究は、メカトロニクス分野のトップジャーナル「IEEE/ASME Transactions on Mechatronics」に掲載されました。
【背景】
一般的に、産業用ロボットのアクチュエータでは、物の移動や加工などを正確に行うために位置の制御性が重視されてきました。しかし、近年登場してきた協働ロボットや人の動きを補助するアシストロボットでは、人や物体に安全に接触することが求められており、力の制御性、特に接触力の調整が重要になっています。例えば、ものづくりの現場では、研磨のような製品の仕上げ加工など、いわゆる職人技と呼ばれる手作業の多くが自動化・省力化できておらず、現場の負担が軽減できていません。従来のアクチュエータ技術で特に実現が難しかったのは、接触点に動きの外乱が加わる状況で「丁度良い力加減の調整(※4)」を実現することでした。特に力加減の調整が可能なアクチュエータが必要とされていました。力加減の調整を実現するためのアクチュエータには、どのような特性が求められるでしょうか。第1に、センサによる情報から接触を正確に予測することが難しいため、接触部に入力される動きの外乱に安全に対応するための高いバックドライバビリティ(※5)です。第2に、人の筋のように小さい力から大きな力まで広範囲に出力でき、ロボットに組み込みやすく小型であることです。第3に、ロボットが人や物体に接触する状況で、接触力調整の応答性が高く、正確であることです。しかし、これら3つの特性(バックドライバビリティ・出力範囲・応答性)は相互に関連しており、単一の駆動原理では、全ての特性を同時に向上させることは困難でした。例えば、減速機付きの電気モータでは、減速比を上げれば力の出力範囲を大きくできますが、バックドライバビリティが失われてしまいます。減速機を用いずにダイレクトドライブ(※6)にすれば、応答性は向上できますが、大きな力を出力するためには多数の磁石とコイルが必要なため、アクチュエータが大きく重たくなってしまいます。他方、空気圧アクチュエータでは、大きな力が出力できますが、応答性が低く、正確に制御できないという課題が知られています。これらの課題を克服する1つの方法として、複数の駆動原理の異なるアクチュエータを組み合わせて相補的に用いることで応答性を向上させるハイブリッド駆動方法が提案されています。しかし、従来のハイブリッド駆動のコンセプトは、複数のアクチュエータの出力を、伝達機構を使って接続し、1つの力として取り出すというものでした。異なる特性のアクチュエータの出力を1つの力に合成するために使用されるケーブルやベルトなどの伝達機構を含む構造は、大型・複雑で壊れやすく、部品点数が多くなるために実用化が難しいという問題がありました。
【手法】
本研究では、融合型ハイブリッド直動アクチュエータ(FHLA:Fusion Hybrid Linear Actuator)という新たなアクチュエータの設計コンセプトを確立しました。FHLAは、2つのアクチュエータの出力を1つの筐体内で融合させる点で、従来のハイブリッド駆動のコンセプトとは異なります。このコンセプトで実現した直動アクチュエータは、空気と電気の2つの駆動源を使用しているものの、あたかも1つのアクチュエータのようにロボットに組み込むことができます。このコンセプトに基づき、これまで組み合わされてこなかったダイレクトドライブの空気圧シリンダとリニアモータを組み合わせて、合成された力をとりだす独自の構造を実現しました(図1)。また、空気圧シリンダのピストンで発生する摩擦力の予測の精度を向上するモデルを開発し、このモデルで推定した摩擦をリニアモータで打ち消し、任意の一定力を維持する力制御システムを開発しました。これまでのハイブリッド駆動の研究では、位置の制御性の向上に関する評価が多く、接触点における力の特性の評価が十分に検討されていませんでした。特に、研磨やマッサージで必要とされる、任意の表面に沿って移動しながら一定の押しつけ力を維持する能力を評価する指標は開発されていませんでした。そこで、本研究では、アクチュエータの先端の接触点に動きの外乱が加わる状況で、一定の押しつけ力を維持する能力を評価するための新たなベンチマーク(Maintaining contact force constant (MCFC) benchmark)を提案し、先端を様々な形状の表面に押しつける際に生じる動きの外乱を模擬する実験装置(図2)を開発しました。具体的には、図2の右のアクチュエータを位置制御して外乱を加えることで、提案するアクチュエータの性能を評価しました。この実験で、広い力の範囲で一定の押しつけ力を維持する能力が大幅に向上したことが実験で示され、従来のアクチュエータよりも接触点における動きの外乱に対して優れた力制御性能を持つことが確認されました。
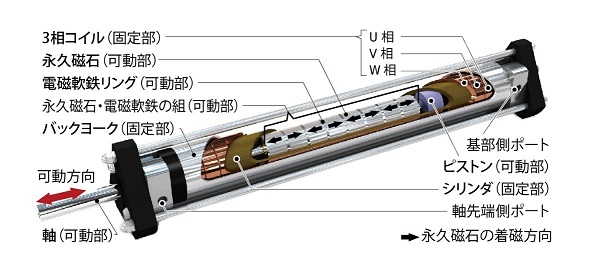
図1 アクチュエータの内部構造
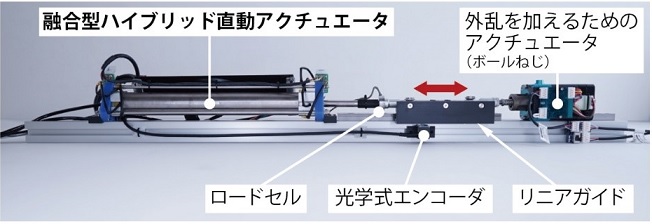
図2 評価実験装置
【成果】
次に本研究では、2つ以上のアクチュエータの可動部を直接接続して力を合成し、なおかつ可動空間を共有させる設計コンセプトを示しました。このコンセプトに基づく直動アクチュエータを新たに融合型ハイブリッド直動アクチュエータ(FHLA)と名付けました。本設計コンセプトにより従来のハイブリッド駆動のための力の合成が、1つの筐体に融合されたアクチュエータの中で行われるため、ロボットに組み込みにくかったという基本課題が解決できます。今回、このコンセプトに基づき、空気圧シリンダとリニアモータをハイブリッド化させた空電ハイブリッドアクチュエータは、バックドライバビリティの高い2つのアクチュエータであるため、ハイブリッドアクチュエータ自身も高いバックドライバビリティを有しており、人や環境との安全な接触が可能です。また、本研究ではこのアクチュエータの力制御も実現し、空気のみを動力源とする場合と比較して、一定の押しつけ力を維持する能力が大幅に向上したことが示されました。実験では、電気のみを駆動源とする場合には、実現が難しい範囲まで押しつけ力を設定することで、電磁力で駆動する場合に対する優位性も示しています。以上から、FHLAのコンセプトに基づくアクチュエータは従来の空気圧アクチュエータや電磁アクチュエータに比べ、押しつけ方向に生じる接触点の様々な動きの外乱に対して、押しつけ力を一定に維持できる性能が高いことが示されました。
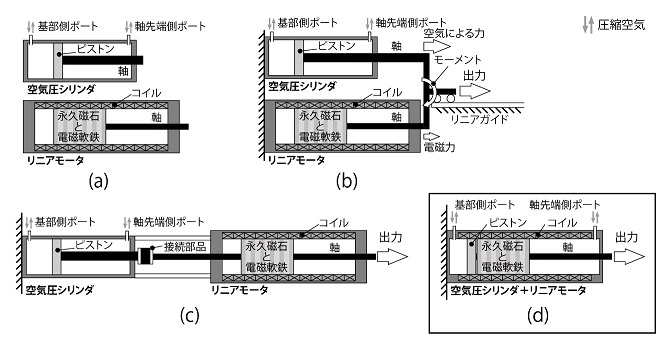
図3 設計コンセプトの比較:(a)は、空気圧シリンダとリニアモータを示している。(b)及び(c)はハイブリッド駆動の従来の設計である。(b)では、両アクチュエータの力が異なるために出力軸を指示する強固なリニアガイドが必要であり、(c)では、接続のためのカップリングと追加の空間が必要である。(d)は、本研究で設計したコンセプトであり、(b)及び(c)にあったガイドやカップリングを必要とせず、あたかも1つのアクチュエータであるかのようにロボットに組み込みでき、小型化できる。
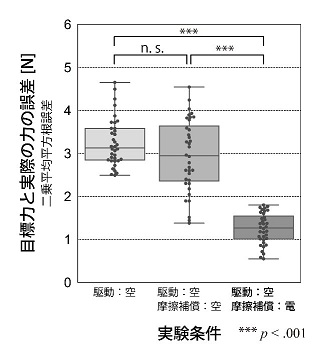
図4 実験結果:縦軸は接触点に動きの外乱を加えた時の目標力と実際の力の誤差を示す。左から、空気による駆動条件、空気による駆動で摩擦を補償した条件、空気による駆動に電磁力で摩擦を補償した条件である。
【今後の期待】
この新しいアクチュエータは、2つの直動アクチュエータを1つのアクチュエータに融合しているにも関わらず、1つの筐体内で力を合成し出力することができるため装置に組み込みやすく、これまでのアクチュエータでは実現できなかったような、接触時の外乱で力の制御が必要なアプリケーションへの展開が期待できます。例えば、研磨やマッサージのように接触点の力加減の調整が重要なアプリケーションや、人間に接触しながら作業を支援する共同ロボット、また、リハビリテーションで人をアシストする外骨格型ロボットなど、多様なロボット技術への適用が期待されます。
(論文情報)
著者名:Yoshihiro Nakata and Tomoyuki Noda論文名:Fusion Hybrid Linear Actuator: Concept and Disturbance Resistance Evaluation
雑誌名:IEEE/ASME Transactions on Mechatronics
DOI:10.1109/TMECH.2023.3237725
公表日:2023年3月28日
(外部資金情報)
本アクチュエータ技術の研究開発の一部は、科研費 基盤研究(A)(JP21H04911)、若手研究(A)(JP17H04698, JP15H05321)、挑戦的萌芽研究(JP26540134)の支援を受けて行いました。また、本研究の一部はAMED(JP21he2202005, JP22he2202017)の支援を受けて行いました。
(用語説明)
※1 アクチュエータ:機械やロボットなどで使用される駆動装置のこと。入力されたエネルギーを物理的な動きに変換する機構。現代では、電気モータが最も広く使用されている。
※2 ハイブリッド駆動:力の大きさと応答性の両立を実現するために、出力は大きいが応答性が低いアクチュエータ(例:空気圧アクチュエータ)と出力は小さいが応答性が高いアクチュエータ(例:電気モータ)を組み合わせた駆動方法。本研究の実験では、空気によって大きな力を発生させ、応答性を低下させる機械摩擦を、電磁力で補償する手法を用いた。
※3 外乱:システムやプロセスに影響を与える予期しない、またはモデル化されていない外部からの力や影響のこと。本研究では、FHLAに対してボールねじを用いたアクチュエータを接続し、そのアクチュエータを位置制御することで、FHLAに外乱を与える
※4 丁度良い力加減の調整:目的に合わせて正確な力を加えるために、力を適切に調整すること。
※5 バックドライバビリティ:アクチュエータの出力軸に外部からの力が加わったときに、出力軸が自発的に動く能力のこと。バックドライバビリティが高い装置は、外部からの力が加わっても手動で容易に動かすことができ、接触に対する安全性が高まる。
※6 ダイレクトドライブ:駆動軸と負荷軸を直接結合し、中間に減速機や伝達機構を置かない伝達方式。伝達損失が少なく、高精度で高効率な動力伝達が可能。伝達機構がないため、バックドライバビリティが高く、負荷側の動きに合わせて駆動側が柔軟に対応できる。
【連絡先】
〈研究内容に関すること〉
電気通信大学大学院 情報理工学研究科
【職名】准教授
【氏名】仲田 佳弘
Tel: 042-443-5182 E-Mail:ynakata uec.ac.jp
uec.ac.jp
株式会社 国際電気通信基礎技術研究所(ATR)脳情報通信総合研究所
【職名】主幹研究員
【氏名】野田 智之
Tel: 0774-95-1215 E-Mail:t_nodaatr.jp
〈報道に関すること〉
【職名】准教授
【氏名】仲田 佳弘
Tel: 042-443-5182 E-Mail:ynakata
uec.ac.jp 株式会社 国際電気通信基礎技術研究所(ATR)脳情報通信総合研究所
【職名】主幹研究員
【氏名】野田 智之
Tel: 0774-95-1215 E-Mail:t_noda
atr.jp
電気通信大学 総務企画課 広報係
Tel: 042-443-5019 Fax: 042-443-5887
E-Mail:kouhou-koffice.uec.ac.jp
株式会社 国際電気通信基礎技術研究所(ATR)経営統括部 企画・広報チーム
Tel: 0774-95-1176 Fax: 0774-95-1178
Email:pratr.jp
Tel: 042-443-5019 Fax: 042-443-5887
E-Mail:kouhou-k
office.uec.ac.jp株式会社 国際電気通信基礎技術研究所(ATR)経営統括部 企画・広報チーム
Tel: 0774-95-1176 Fax: 0774-95-1178
Email:pr
atr.jp