プレスリリース

2023年 12月 6日
株式会社 国際電気通信基礎技術研究所(ATR)
株式会社 国際電気通信基礎技術研究所(ATR)
人を抱きしめて頭を撫でるロボットを開発
~人と物理的に触れ合うロボットの振る舞い設計に貢献~
- 他者との触れ合いは、信頼や愛情を育むために欠かせない行為です。たとえ相手がロボットであっても、触れ合うことで親しい関係を育めることが知られています。
- 私たちの研究グループでは、人も抱きしめられるロボットを開発し、抱きしめている間の動作(頭や背中を撫でたり、ぎゅっとしたりする動作)が人に及ぼす効果を検証しました。
- その結果、抱きしめている間にぎゅっとするよりも撫でるほうがより愛着を感じられること、背中よりも頭を撫でることでロボットが自身をより助けてくれる存在であると感じられること、が明らかになりました。
- これらの知見は、人と物理的に触れ合うロボットの振る舞い設計に役立つと期待されます。
- この成果は、ロボティクス分野における主要論文誌の1つであるInternational Journal of Social Roboticsに採択されました。

図1 人を抱きしめて頭を撫でている様子(左)、
開発したロボット「Moffuly-II」の外観(右)
概要
ATR深層インタラクション総合研究所のグループは、大人も抱きしめられる大型のロボット「Moffuly-II」を開発しました。このロボットは、人を抱きしめながら人の頭や背中を撫でたり、ぎゅっとしたりすることができます(図1)。実験では、人を抱きしめている間の動作が人に及ぼす効果を検証し、抱きしめている間にぎゅっとするよりも撫でるほうがより愛着を感じられること、背中よりも頭を撫でることでロボットが自身をより助けてくれる存在であると感じられること、を明らかにしました。この知見は、ロボットが人を抱きしめる際の動作設計に貢献できると考えられます。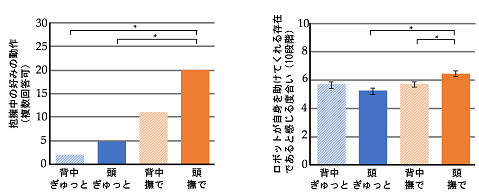
*は有意差があることを示します
図2 頭を撫でるほうが頭や背中をぎゅっとするよりも好ましいことを示した結果(左)と、背中よりも頭を撫でることでロボットが自身を助けてくれる存在と感じることを示した結果(右)
背景
触れる、抱きしめる、キスするといった他者との触れ合いは、信頼や愛情を育むために欠かせない行為です。触れ合いは様々な観点から人にとって効果的ですが、COVID-19で物理的な分離が生じてしまったように、誰もがその恩恵を受けられるわけではありません。この問題を解決するために、人同士の触れ合いを代替するソーシャルロボットの研究開発が進んでいます。過去の研究では、ストレス緩衝や自己開示の促進など、たとえ相手がロボットであっても、触れ合うことで親しい関係を育めることが報告されています。また、親密な関係を持つ人々は、抱擁が親密な感情を伝え、抱擁中の動作として他人の顔や頭に触れることがわかっています。しかし、人を抱擁するロボットの研究がなされてきましたが、抱きしめる際に頭を触る動作にはあまり重点が置かれていませんでした。そこで、私たちの研究グループは「抱擁中にロボットが人の頭に触れる場合、どのような動作が効果的なのか?」という研究課題に取り組みました。
研究の狙い
人同士の触れ合いを分析した研究では、撫でる動作の重要性が報告されています。一方、抱擁ロボットを使った別の研究では、撫でるよりもぎゅっとする動作の方が効果的であると報告されています。これらの仮説のもと、抱擁中の動作を比較した時、[撫でる動作/ぎゅっとする動作]で、ロボットの印象を好意的に感じるのではないか、という触れる動作について相反する2つの予測を立てました。また、過去の研究では、頭を触れることの重要性が一貫して強調されていました。人同士の触れ合いでは、人間は親密な関係で他人の頭に触れることが示されています。また、人間とロボットの触れ合いでは、ロボットが親密な関係を表出するときに人がロボットの頭に触れることが示されています。これらの研究より、ロボットが人の頭部に触れた場合でも効果的であると考えられます。したがって、ロボットとの抱擁中、人は背中に触れられるよりも頭に触れられることを好むのではないか、という触れる場所に関する予測を立てました。
場所(背中と頭)と動作(ぎゅっとすると撫でる)を比較する実験とその結果について
この予測を調べるため、場所(背中と頭)と動作(ぎゅっとすると撫でる)の4通りの組み合わせを比較する実験を行いました。実験参加者は4つの異なる抱擁を全て体験し、その印象をアンケートで回答しました。その結果、ぎゅっとするよりも撫でる動作が(図2左のグラフ)、背中を撫でるよりも頭を撫でる動作(図2右のグラフ)が効果的であることがわかりました。これらは、撫でるよりもぎゅっとする動作のが効果的であるという過去の抱擁ロボットの研究とは逆の結果であり、私たちはこの違いが撫でる動作の設計に起因していると考えています。過去の研究は、撫で上げる動作と撫で下げる動作の両方が含まれていました。一方、「Moffuly-II」の撫で動作は、髪や衣服を乱さないように撫で下げ動作のみを採用していました。この撫で動作の違いが、体験者にポジティブな印象を与えた可能性があります。
今後の展開
本成果は、抱きしめながら頭を撫でる動作を受けることで、ロボットに愛着を感じてもらえることを示しています。関連研究では、ロボットが人を抱きしめることで、人にとって良い行動変容を引き起こすことが報告されています。そのため、ロボットが人を抱きしめながら頭を撫でることで、人々にとってより良い行動変容が起こる可能性を示唆しています。
【掲載論文】
題名:Moffuly-II: A Robot that Hugs and Rubs Heads
( 頭を撫でながら抱擁するロボット「Moffuly-II」 )
( 頭を撫でながら抱擁するロボット「Moffuly-II」 )
著者:Yuya Onishi, Hidenobu Sumioka and Masahiro Shiomi
大西 裕也(ATR)、住岡 英信(ATR)、塩見 昌裕(ATR)
掲載誌: International Journal of Social Robotics
掲載日: 令和5年12月 6日 (日本時間) オンライン版公開DOI: 10.1007/s12369-023-01070-5
【研究支援】
本研究は、JST戦略的創造研究推進事業(CREST:ソーシャルタッチの計算論的解明とロボットへの応用(研究代表者:塩見昌裕、JPMJCR18A1))、科研費(若手研究:子供が安全・安心して触れ合える抱擁ロボットの構築 (代表:大西裕也、23K13305))の研究プロジェクトの一環として実施されました。
【実験手順の詳細について】
本研究では、場所(背中・頭)と動作(ぎゅっとする・撫でる)の2要因(4通りの組み合わせ)を比較しました。実験開始時に、参加者はロボットに抱きついてもらい、頭と背中の位置を確認するキャリブレーションを行いました。キャリブレーション後、参加者は各条件下でロボットとの抱擁を体験しました。それぞれの抱擁時間は約10秒で、そのうち3秒間の付随動作が含まれています。また、会話の影響を避けるためにロボットと静かに抱き合いました。それぞれの抱擁動作を体験した後、参加者はロボットの印象をアンケートで評価しました。実験には、30名(男性15名、女性15名)が参加し、2要因分散分析で比較しました。その結果、ぎゅっとする動作よりも撫でる動作が、背中を撫でる動作よりも頭を撫でる動作が効果的であることが示されました。
【本件に関するお問い合わせ先】
■株式会社国際電気通信基礎技術研究所(ATR)
経営統括部 企画・広報チーム
TEL:0774-95-1176
FAX:0774-95-1178
Email:pr atr.jp
atr.jp
経営統括部 企画・広報チーム
TEL:0774-95-1176
FAX:0774-95-1178
Email:pr
atr.jp