プレスリリース



令和7年 8月 26日
株式会社国際電気通信基礎技術研究所(ATR)
大阪公立大学
アリゾナ州立大学
株式会社国際電気通信基礎技術研究所(ATR)
大阪公立大学
アリゾナ州立大学
自発的な役割分担が協調作業の成績を決定する
―2者間の物理的協力における機能的役割分化の発現とその影響―
―2者間の物理的協力における機能的役割分化の発現とその影響―
8月25日午後10時(米国太平洋岸時間)
The International Journal of Robotics Research誌 オンライン版に掲載
本研究成果のポイント
✔ 人が協力して作業する場合でも、常に1人より優れた成果が得られるとは限りません。本研究は、協力の効果が発揮される条件を明らかにすることを目的としました。
✔ これまでの研究では、事前に役割が与えられた場合に高いパフォーマンスが得られるとされてきましたが、明示的な指示がない場合には結果にばらつきがありました。本研究では、自発的に役割が形成される状況に着目し、協力の効果を検証しました。
✔ 実験では、ロボットアームを使って仮想空間上の棒を水平に運ぶ課題を実施し、2人ペアと1人(両手操作)での成績を比較しました。役割の指示はせず、タスクの力学的条件(対称・非対称)を操作することで役割分化の誘発を試みました。
✔ その結果、非対称条件*1ではペアの方が個人より成績が良く、先導・追従といった役割分担が徐々に形成される様子が確認されました。一方、対称条件ではそのような分担は見られず、個人の方が安定した運動を遂行しました。
✔ 協力が常に効果的とは限らず、役割分担が自発的に生じるか否かが、協力によって個人より優れた成果が得られるための重要な要因であることが示されました。
✔ 本研究は人同士の協力における役割分担の重要性を示したものであり、今後はこの知見を人とロボットの協力作業にも応用することが期待されます。特に、リハビリ支援や作業補助など、人とロボットが共に動作する多様な場面への展開が見込まれます。
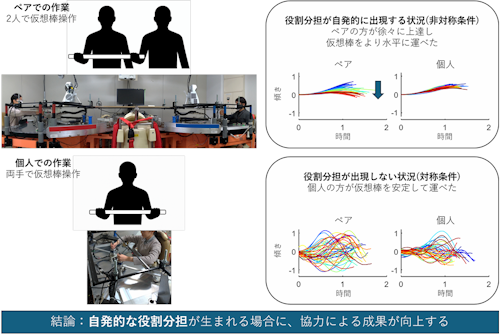
図1:協力作業の成果に影響を与える要因としての機能的役割分担
概要
人と人が一緒に作業をすると、1人でやるよりうまくいくことがあります。しかし、必ずしも「2人でやれば何でも良くなる」とは限りません。本研究では、2人が連携して仮想の棒を水平に保ちながら運ぶタスクを通じて、協力の効果に影響を与える重要な要素として自発的な役割分担の存在を明らかにしました。実験では、ロボットアームを用いて、仮想棒を操作する課題を実施しました。仮想棒は物理モデルに基づいて動作し、回転軸(ピボット)の位置が中央にない「非対称な力学条件」と、中央にある「対称な力学条件」の2種類の設定が用意されました。いずれの条件でも、2人で操作する「ペアモード」と、1人で両手を使う「個人モード」を比較しました。
その結果、ペアの成績が個人よりも良かったのは「非対称条件」のときであり、そこでは徐々に一方が動作を主導し、もう一方が補助するような役割分担が形成されていました。一方、対称条件ではそうした役割が生まれず、むしろ個人の方が安定した運動を遂行しました。
このように、物理的に非対称な条件下で「リーダー」「フォロワー」の関係が自然と生まれた場合に、協力による成績が良くなることが確認されました。この発見は、人とロボットの協調設計や、リハビリ支援システムへの応用が期待されます。
背景
人と人が協力して作業を行うと、一般的には1人で行うよりも高い成果を上げられると考えられています。たとえば、異なる視点や能力を持つ人同士が力を合わせることで、タスクの達成効率が高まることが期待されます。しかし、実際には協力によって常に高いパフォーマンスが得られるわけではありません。状況によっては、協力することがかえって作業の妨げになるなど、非効率を生む場合もあります。この「協力の優位性」が発揮される場合とそうでない場合があるのかについては、まだ十分に解明されていないのが現状です。その一因として注目されているのが「役割分担」の有無です。これまでの多くの研究では、参加者にあらかじめ明示的に役割(例:機械の上下操作担当・前後操作担当)を設定した上でタスクに取り組ませることが一般的でした。その結果、明確な役割分担がある場合にはペアでのパフォーマンスが向上することが確認されています。しかし現実の場面では、あらかじめ役割が決められているとは限らず、参加者同士がその場の状況に応じて自然と役割を分担することがあります。たとえば、重い荷物を運ぶ際に、自然と1人が方向を決め、もう1人が支えるなどのような協力関係が形成されることがあります。
こうした「自発的な役割分担」が、協力の成果にどのような影響を与えているのかを明らかにすることは、人の協力行動を理解する上で極めて重要です。さらに、このような人と人の自発的な役割形成メカニズムを理解することは、今後人とロボットが共に作業する場面の設計にも不可欠です。現在の人–ロボット協調技術では、ロボットが人に従うように事前にプログラムされた動作を行うことが主流ですが、人と同様に、状況に応じて柔軟に役割を担うことのできるロボットの開発が求められています。本研究は、そのようなインタラクションのデザインに向けた基盤知識の確立にもつながります。
研究内容
<手法>
本研究では、参加者に2人1組のペアを組んでもらい、ロボットアームを操作して仮想空間上の棒をできるだけ水平に保ちながら、決められたゴール地点まで運ぶという協力課題に取り組んでもらいました。この課題は、2台のロボットマニピュランダ(TVINS)によって制御され(図1写真)、参加者の操作によって仮想棒の動きがリアルタイムにシミュレーションされました。視覚的なフィードバックは上部のスクリーンに投影され、ハンドル位置と加えた力に基づく物理演算により、リアルタイムの力覚フィードバック*2を伴った仮想棒の動きが再現されました。<手法>
ペア条件では、2人の参加者が互いに見えないように壁で仕切られ、音声も遮断されることで完全に非言語的な状況を作り出しました。また、参加者には「別々の実験をしている」と伝え、意図的に協力を促すような説明を避けました。これにより、事前に役割を与えず、参加者同士が自然に役割を形成していく過程を観察可能にしました。
実験では、2種類の力学条件を設定しました(図2)。一つは「非対称条件」で、仮想棒の回転軸が左端に配置されており、操作手が異なる長さのモーメントアームを介して棒を操作する構造です(左:右=9:10)。この構造により、力の影響に自然な偏りが生じ、役割分担が誘発されやすくなります。もう一つは「対称条件」で、回転軸が中央にあり、操作手が対称(左:右=1:1)に配置されることで、役割が自然発生しにくい設計です。
加えて、課題を1人の参加者が両手で行う「個人条件」も設定し、2種類の力学条件の比較を行いました。ペアと個人での成績や動作パターンを比較することで、協力による効果を定量的に評価しました。棒の水平維持の精度、タスク完了時間、試行回数など複数の指標を用いて、パフォーマンスを総合的に判断しました。
さらに、TVINSから得られた力や動きのデータをもとに、どちらの手が先に動いているか、どちらがより力を出しているかを解析し、協力の中で役割が生まれているかを数値で捉えました。これにより、「リーダー」と「フォロワー」といった協力の実態を詳細に把握することが可能となりました。
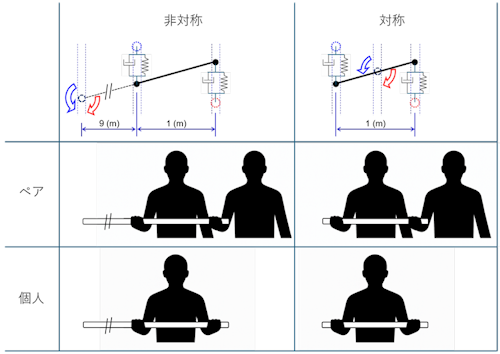
図2:仮想空間での棒操作課題の概要
参加者は2人1組でロボットアームを操作し、仮想空間内の棒を水平に保ったままゴールまで移動させる。力学条件として「対称」と「非対称」を設定。操作モードとして「ペア」と1人の参加者が両手で行う「個人」も設定。
参加者は2人1組でロボットアームを操作し、仮想空間内の棒を水平に保ったままゴールまで移動させる。力学条件として「対称」と「非対称」を設定。操作モードとして「ペア」と1人の参加者が両手で行う「個人」も設定。
<成果>
実験の結果、非対称条件では、ペアの参加者が試行を重ねるごとに動きを調整し、仮想棒の傾きをより小さく抑えることに成功しました。自然に一方がリードし、もう一方が補助するという役割分担が生まれ、ペアの成績が個人よりも優れていました。これは、視覚的・触覚的フィードバックを手がかりにしながら、徐々にリーダーとフォロワーという安定した役割関係が自然に形成され、学習と適応を通じて協調戦略が進化したことを示しています。とくに注目すべきは、仮想棒の傾き(水平を保つ精度)とペアの両者の手の位置差との間に見られた関係です。試行初期には、左右の手の位置差は小さく、仮想棒の傾きも大きくばらついていましたが、試行を重ねるごとに、参加者の一方が先導し、もう一方が追従する形で一貫した役割関係が構築され、同時に棒の傾きも小さくなっていきました。この関係は、図3左において、位置差と傾き角度の関係が右肩下がりに変化していくことで視覚的に確認できます。一方、対称条件(図3右)ではこうした関係は観察されず、協力関係は一貫しないままでした。
これは、非対称条件においては試行を通じて役割分担が自然に形成され、協調による成果が向上する一方で、対称条件ではそうした自発的な役割形成が起こりにくく、結果としてパフォーマンスも向上しないことを意味します。
なお、非対称条件における協力関係はタスク成功のための必須条件ではないことは、コンピュータシミュレーションによって確認されています。仮想的に想定しうるタスク成功のパターン(図3の灰色領域)は広範囲に分布し、役割が固定されない様々な戦略の存在を示しています。したがって、実際の参加者は、広範なタスク成功のパターンの中から、一方が先導しもう一方が追従するという安定的な協力関係に自然と収束していることが観測されました。
結果として、非対称条件においてはペアの成績が個人よりも良好であったのに対し、対称条件では個人の方がペアよりも安定した運動を遂行しました。これは、明確な役割分担が自然に成立する状況で、協力による「アセンブリ・ボーナス効果」、すなわち協力によって個人を上回る成績が得られる現象が生じることを意味します。このことは、人数の多さよりも、役割の補完性が協力の成功において重要であることを示唆しています。また、最終的な試行時間や成功回数においては、非対称条件での個人とペアの間に有意差は見られませんでしたが、空間的精度(仮想棒の傾き)においてはペアが優れていました。このように、協力における役割分担の自発的形成が、協力行動の質を高める上で重要であることが明らかになりました。
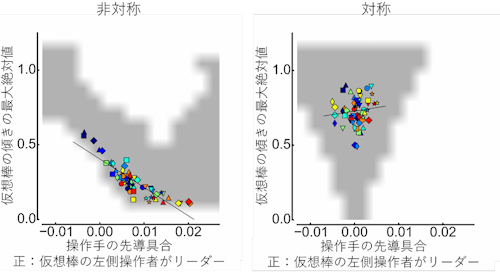
図3:力学条件における仮想棒と役割分担の関係
非対称条件においては、参加者が繰り返しタスクに取り組む中で(青マーカから赤マーカ)、暗黙的な学習を通じて一貫したリーダー・フォロワー関係が形成され、ペアとしてのパフォーマンスが向上した。一方、対称条件においては、そのような変化は見られない。
非対称条件においては、参加者が繰り返しタスクに取り組む中で(青マーカから赤マーカ)、暗黙的な学習を通じて一貫したリーダー・フォロワー関係が形成され、ペアとしてのパフォーマンスが向上した。一方、対称条件においては、そのような変化は見られない。
期待される効果・今後の展開
本研究の成果は、人同士の協力動作の本質に迫るだけでなく、今後人とロボットが共に作業する場面の設計にとっても大きな意義を持ちます。ロボットが人と自然に協力するためには、相手の行動からリーダー・フォロワー関係を柔軟に構築できる必要があります。例えば、リハビリ支援に応用することで、運動支援ロボットが自在にリーダーとフォロワーの役割を切り替え、患者の運動回復を促進するような支援技術の開発ができるかもしれません。本研究で示された自発的役割形成が、ロボットが人とともに適応的に学習し、協調的な役割分担を実現するための制御指針になると期待されます。
論文著者名とタイトル
掲載誌:The International Journal of Robotics Research論文名:Role specialization enables superior task performance by human dyads than individuals
著者:Asuka Takai, Qiushi Fu, Yuzuru Doibata, Giuseppe Lisi, Toshiki Tsuchiya, Keivan Mojtahedi, Toshinori Yoshioka, Mitsuo Kawato, Jun Morimoto, Marco Santello
doi: 10.1177/02783649251363274.
研究グループ
*責任著者
国際電気通信基礎技術研究所(ATR):
髙井飛鳥*(大阪公立大学)、土井畑禅、Giuseppe LISI、吉岡利福(XNef)、川人光男(XNef)、森本淳*(京都大学)
髙井飛鳥*(大阪公立大学)、土井畑禅、Giuseppe LISI、吉岡利福(XNef)、川人光男(XNef)、森本淳*(京都大学)
アリゾナ州立大学(Arizona State University)
土屋稔生、Keivan Mojtahedi、Marco Santello*
土屋稔生、Keivan Mojtahedi、Marco Santello*
セントラルフロリダ大学(University of Central Florida)
Qiushi Fu
Qiushi Fu
研究支援情報
本研究は、以下の助成により実施されました。・米国国立科学財団(NSF)助成金[BCS-1827752]
・国立研究開発法人情報通信研究機構(NICT)委託研究[18701]
・国立研究開発法人日本医療研究開発機構(AMED)研究費[JP22he2202017]
・防衛装備庁 安全保障技術研究推進制度(ATLA)助成金[JPJ004596]
・公益財団法人栢森情報科学振興財団
・国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)助成金[JPNP20006]
お問い合わせ先
<研究内容に関すること>株式会社 国際電気通信基礎技術研究所(ATR) 脳情報通信総合研究所
【職名・氏名】客員研究員・髙井飛鳥
Email:atakai
 atr.jp
atr.jp<報道に関すること>
株式会社 国際電気通信基礎技術研究所(ATR) 総務部 広報チーム
Tel: 0774-95-1176 Fax: 0774-95-1178
Email:pr
atr.jp
用語説明
*1 非対称条件:仮想棒に対する操作入力の位置と棒の回転中心までの距離が不均等な条件。*2 力覚フィードバック:操作者の動作やタスク状態に応じて、ロボットアームがハンドル部を通じて操作者に押し返し(反力)または引っ張り(牽引)として力を提示する機構を指す。これにより操作者は、視覚情報に加えて力覚情報を得られ、タスク遂行や操作感覚の向上が期待される。