プレスリリース


株式会社 国際電気通信基礎技術研究所
国立大学法人 電気通信大学
- リハビリテーション用のロボットのためにアシスト中の機械的透明性を高める技術を開発
- 独自構造の新開発の融合型ハイブリッドアクチュエータを搭載した駆動関節に特徴
- 外乱に強い関節の正確かつ大きなトルク制御を実現
- これまで難しかった中・重度の片麻痺患者に適応するリハビリテーションロボットの実現に期待
この研究では、従来のアシストロボットでは難しかった、ロボットの関節のアシスト中の機械的な透明性を高める技術と、透明性を検証するベンチマーク試験を開発しました。具体的には、様々な速度で外部から動きの外乱が与えられた時の、ロボット関節のトルク制御性を詳細に評価し、アシスト中に高い機械的透明性を実現できることが検証されました。この駆動技術により、ロボットを装着したユーザは、ロボットにアシストされているにも関わらず、ロボットが持つ機械的特性に制約されることなく自然な動きを実現したリハビリテーションやトレーニングを受けられることが期待できます。
この成果は、ロボティクス領域のトップカンファレンスであるICRA2024(米国電気電子学会(IEEE)主催)に採択され口頭発表されます。また、同国際会議における学会併設展示において当該技術を搭載した肩関節リハビリテーションロボットが展示・デモ発表されます。
野田 智之 主幹研究員(国際電気通信基礎技術研究所脳情報通信総合研究所)
寺前 達也 研究員(国際電気通信基礎技術研究所脳情報通信総合研究所)
仲田 佳弘 准教授(電気通信大学大学院情報理工学研究科機械知能システム学専攻)
からなる研究グループ(論文の著者順)
従来の動的透明性の研究では、ロボットがその動作に追従して動き、ロボットが使用者の動作を妨げないようにすることが目標とされていました。しかし、この目標を達成するだけではロボットはユーザをアシストすることはできません。従来の駆動技術では、大きな力を出力した状態で動的透明性を高くしようとすると、制御が不安定になる問題から、十分に動的透明性を高めることができないという問題がありました。
現実のリハビリテーションでは、適時適切な支援力を提供することが必須です。特に中度から重度の障害を持つ患者に対しては、大きなアシスト力を出力する必要があります。このような状況では、従来技術では動的透明性を高めることができません。本研究では、このような患者群のため、リハビリテーションロボットが安定して十分なアシストを行いつつも、使用者の動作を妨げないようにする「アシスト中の動的透明性」を高めることを新たな研究コンセプトとして提案しました。
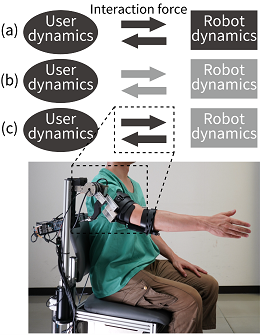
図1 アシストロボットにおける「透明性」コンセプト。(a) 従来のロボット:ロボット固有の特性がユーザとの間に望ましくない相互作用力を発生させ、ユーザの自由な動作を制約する。(b) 従来の透明性コンセプト:相互作用力を0に保ち、ユーザの自由な動作を可能とするが、アシスト力は発生させない。(c) 提案されたアシスト中の透明性コンセプト:アシストのための相互作用力を発生させている最中に、ユーザの動作にロボットが追従しながらも、ロボット固有の特性を適切に打ち消し、理想の相互作用力を保ち続ける。このコンセプトは自身で腕を動かすことができず、常にアシスト力が必要となるような重・中度患者のリハビリテーションにおいて、自然なリハビリテーションを実現するために重要である。
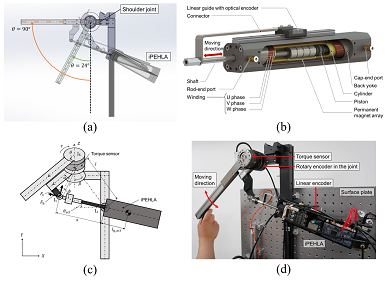
図2 開発した試験機。(a) 肩関節機構の動作範囲。(b) 試験機に搭載された融合型ハイブリッド
アクチュエータの構造。図の一部は断面図である。(c) 試験機の模式図。(d) 実験装置の写真。
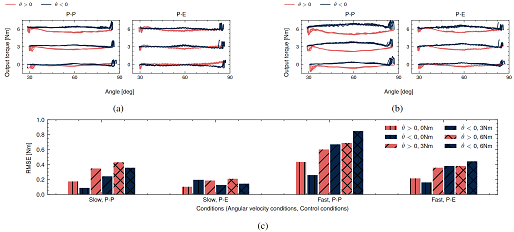
図3 試験機の透明性の評価実験結果。異なる角速度の動作外乱(Slow: 0.31 rad/s, Fast: 0.65 rad/s)に対して、試験機のトルクを目標値(0, 3, および6 N)に保つ能力を評価した。トルクの生成能力は、2つのシステムの制御方法(P-PとP-E)で比較した。P-P (Pneumatic base force – Pneumatic compensation force) 制御方法では、主な力を空気圧力で出力し、動摩擦も空気圧力で補償する。この制御手法は、従来のエアシリンダでも実施可能である。P-E (Pneumatic base force – Electromagnetic compensation force) 制御方法では、主な力を空気圧力で出力し、動摩擦を電磁力で補償する。この制御手法は、空電ハイブリッドアクチュエータでのみ可能である。(a) Slow条件における関節トルク。 (b) Fast条件における関節トルク。(c) トルクの平均二条平方根誤差の比較。
 atr.jp
atr.jp